Main research topics
 |
 |
 |
 |
 |
Biomechanical Modeling |
Image-Processing |
Robotic Surgery |
Rehabilitation Robotics |
Robotic Hands |
Biomechanical Modeling and Surgical Planning
Heart valve repair is technically difficult; providing the surgeon with an anatomically and biomechanically accurate computer model of a particular patient's valve could enable preoperative surgical planning and potentially improve surgical outcome. We are developing this technology through close collaboration with cardiac surgeons at Children's Hospital Boston. We have developed methods for automatically segmenting heart valve structures in real-time 3d ultrasound images, and we can simulate the ability of valves to close properly using fast & biomechanically accurate computational modeling methods.
 Computational Modeling of Heart Valves for Surgical Planning
Computational Modeling of Heart Valves for Surgical Planning
Surgical repair of heart valves is difficult due to complex anatomy and properties of the valve structures. We aim to develop the technology to enable surgeons to use computer simulation to plan surgical repair of heart valves. We have developed fast and biomechanically accurate computational models of both mitral and aortic valves and used them to study issues relevant to surgical repair of valves. Peter E. Hammer
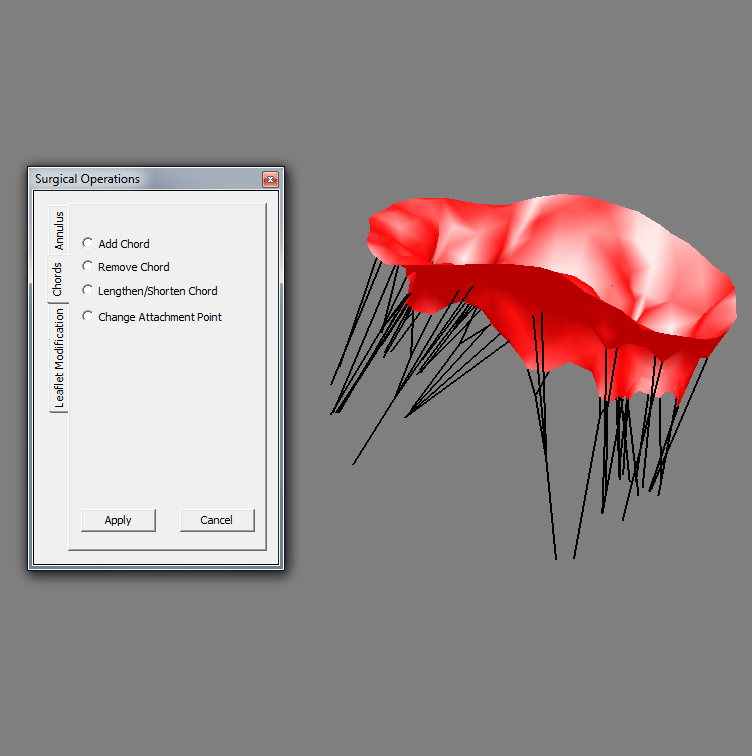 Interactive Surgical Planning
Interactive Surgical Planning
Accelerating the computational valve model, valve mechanics can be simulated at haptic rates, allowing for real-time user interaction. This permits both the assessment of a valve's structure and the virtual implementation of a repair strategy in a manner that is intuitive and interactive. When combined with a patient-specific valve model, such as one generated through advanced ultrasound segmentation, the platform can be used for preoperative planning and case-specific surgeon training. Neil Tenenholtz
Image Processing and Medical Imaging
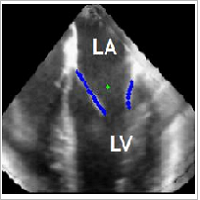
 Mitral Valve Segmentation from Clinical 4D Ultrasound
Mitral Valve Segmentation from Clinical 4D Ultrasound
Visualization and characterization of the mitral valve is especially challenging given its complexity, fast movement, and limitations in current clinical imaging technologies. Oftentimes, acquiring detailed information requires extensive imaging and image processing, which can be time consuming using current methods. This often forces clinicians to make a compromise between speed and completeness of information. We have therefore developed several ultrasound image enhancement and analysis methods to semi-automatically segment the mitral valve from clinical four-dimensional ultrasound and to improve the quality and usefulness of original ultrasound acquisitions. Robert J. Schneider
 Real-time 3D Ultrasound Mosaicing and Visualization
Real-time 3D Ultrasound Mosaicing and Visualization
Real-time visual feedback of the moving structures is critical to the success of beating heart intracardiac procedures. 3D ultrasound is a promising imaging modality for guiding these procedures. However, its narrow field of view limits its efficacy. One way to overcome this shortcoming is to build a mosaic that offers an extended field of view. Volume registration is done on GPU to enable real-time performance. Laura Brattain
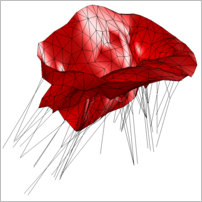
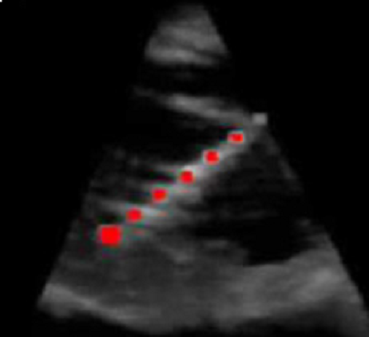 3D Ultrasound Image Processing and Instrument Tracking
3D Ultrasound Image Processing and Instrument Tracking
We continue to expand our 3D Ultrasound image processing toolbox to better enable new intracardiac surgical procedures. For example, we developed a detection technique that identifies the position of the instrument within the ultrasound volume. The algorithm uses a form of the generalized Radon transform to search for long straight objects in the ultrasound image, a feature characteristic of instruments and not found in cardiac tissue. When combined with passive markers placed on the instrument shaft, the full position and orientation of the instrument is found in 3D space. This detection technique is amenable to rapid execution on the current generation of personal computer graphics processor units (GPU). Our GPU implementation detected a surgical instrument in 31 ms, sufficient for real-time tracking at the 25 volumes per second rate of the ultrasound machine. Paul Novotny
 Ultrasound Imaging for Identifying Dynamics of Soft Tissue
Ultrasound Imaging for Identifying Dynamics of Soft Tissue
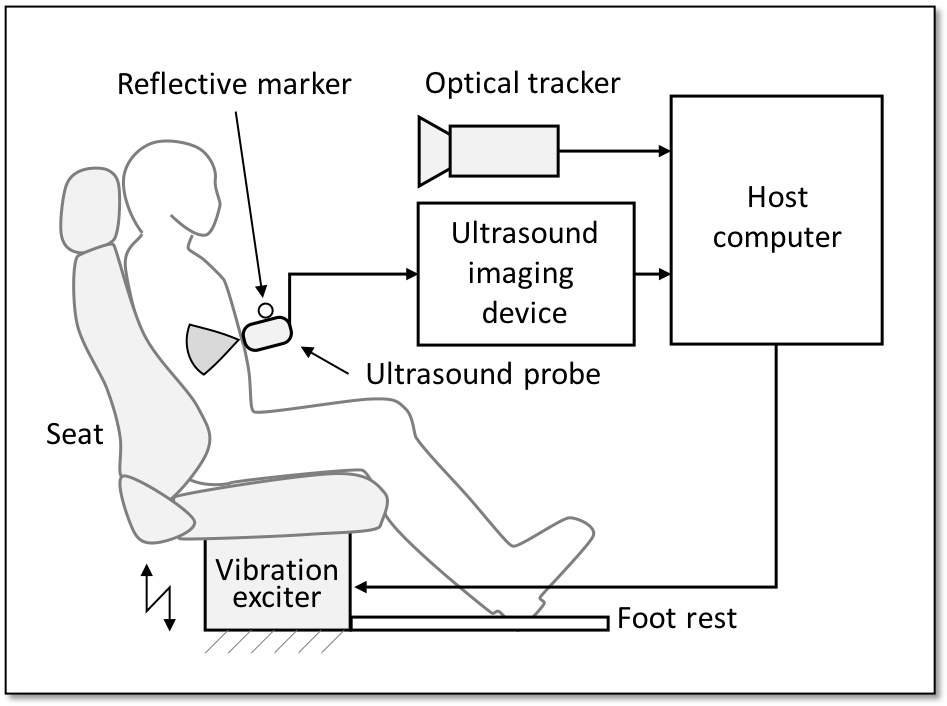
Understanding the in vivo dynamics of soft tissue, including its interaction with adjacent tissues, is a key problem for many fields, because it is expected to improve fidelity of computational models of human body. For instance, a patient-specific model with corresponding soft tissue dynamics would be useful in preoperative surgical planning and training. Also, a passenger-specific model including internal organs' dynamics would contributes to adaptive control of vehicular dynamics for relieving motion sickness and improving rider comfort. We are studying a non-invasive method to identify the in vivo dynamics. Ultrasound is a promising measurement modality due to its compact form, low cost, high sampling rate, and non-invasive nature. We combine an ultrasound imaging system with a whole-body vibration exciter. Using this system, the dynamic characteristics of soft tissues can be identified by associating the observed response with the input vibration. An optical tracker is used to compensate for the vibration-induced motion of the ultrasound probe. Combining multiple ultrasound images taken from different observation points, four-dimensional in vivo motion and deformation of soft tissue can be reconstructed. Daisuke Yamada, Alperen Degirmenci
 Ultrasound Imaging for Understading Muscle Dynamics
Ultrasound Imaging for Understading Muscle Dynamics
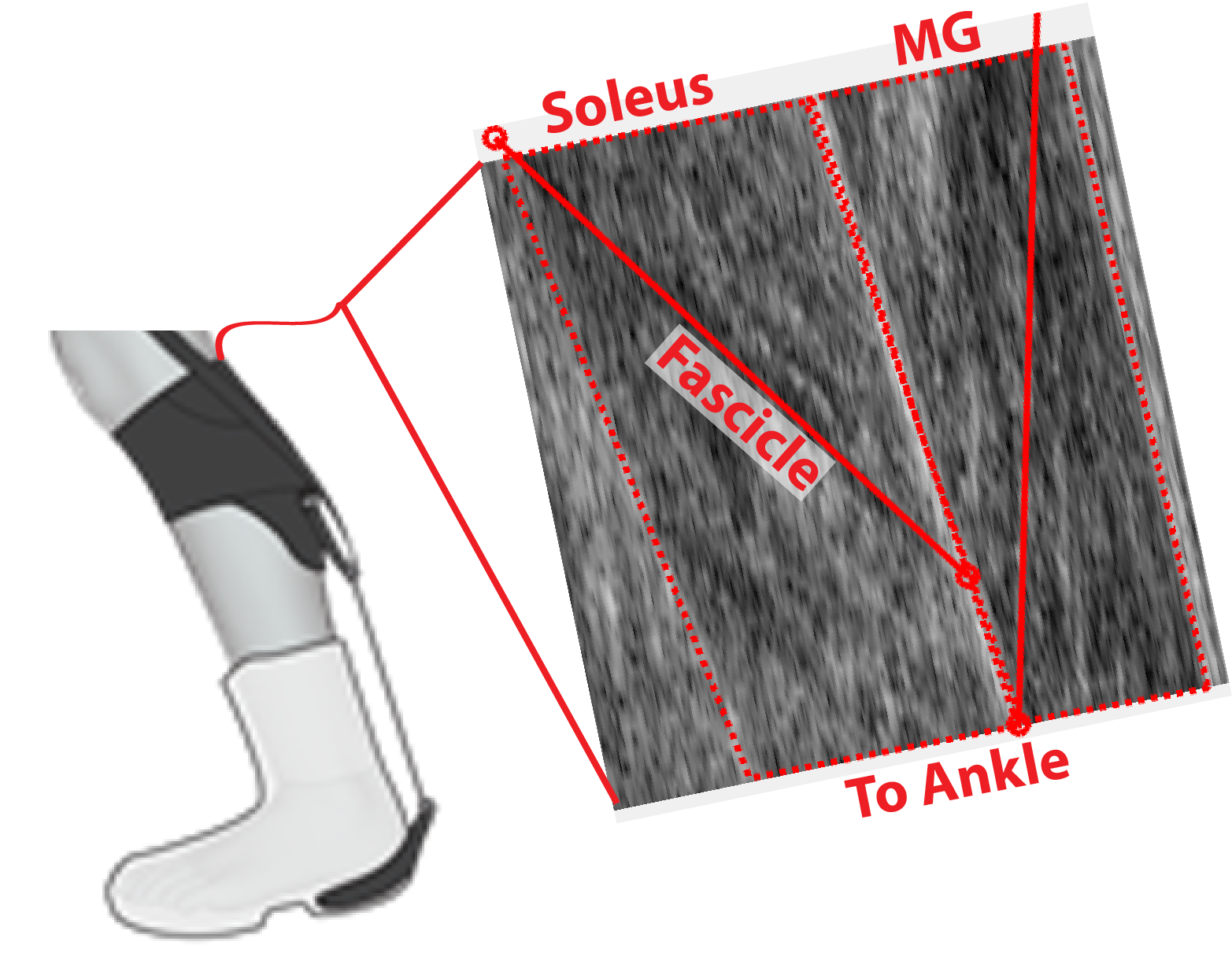
Muscles are biological actuators that can act as motors, clutches, and dampers. Much like how mechanical systems have operating characteristics, the magnitude and economy of force generation in skeletal muscles are dependent on length, velocity, and amount of activation. More traditional metrics such as electromyography and inverse dynamics are incapable of directly measuring many of these operating characteristics. We are using ultrasound imaging to directly measure how muscles respond to robotic assistance during walking. The approach to understanding human/machine interaction combines the research areas of computer vision, engineering, biomechanics, and muscle physiology. Drawing from expertise in the lab, we are developing improved ultrasound processing techniques for tracking and understanding muscle dynamics. Through understanding how muscles respond to exosuit assistance, we can then develop improved controls and enhance the response of both healthy and clinical users. Richard Nuckols, Alperen Degirmenci
Robotic Surgery
To perform procedures inside a patient's heart (intracardiac surgery), cardiopulmonary bypass is necessary so the surgeon can work on a relaxed open heart. Although this technique is the current standard, studies have identified numerous adverse effects of a cardiopulmonary bypass. Minimally invasive procedures could eliminate the need for a cardiopulmonary bypass, thereby allowing the surgeon to work directly inside the beating heart. Real-time 3D ultrasound guided minimally invasive robotic surgery have the potential to enable beating heart intracardiac surgery .
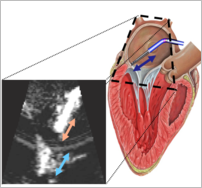
 Robotically controlled catheter-based imaging for beating heart surgery
Robotically controlled catheter-based imaging for beating heart surgery
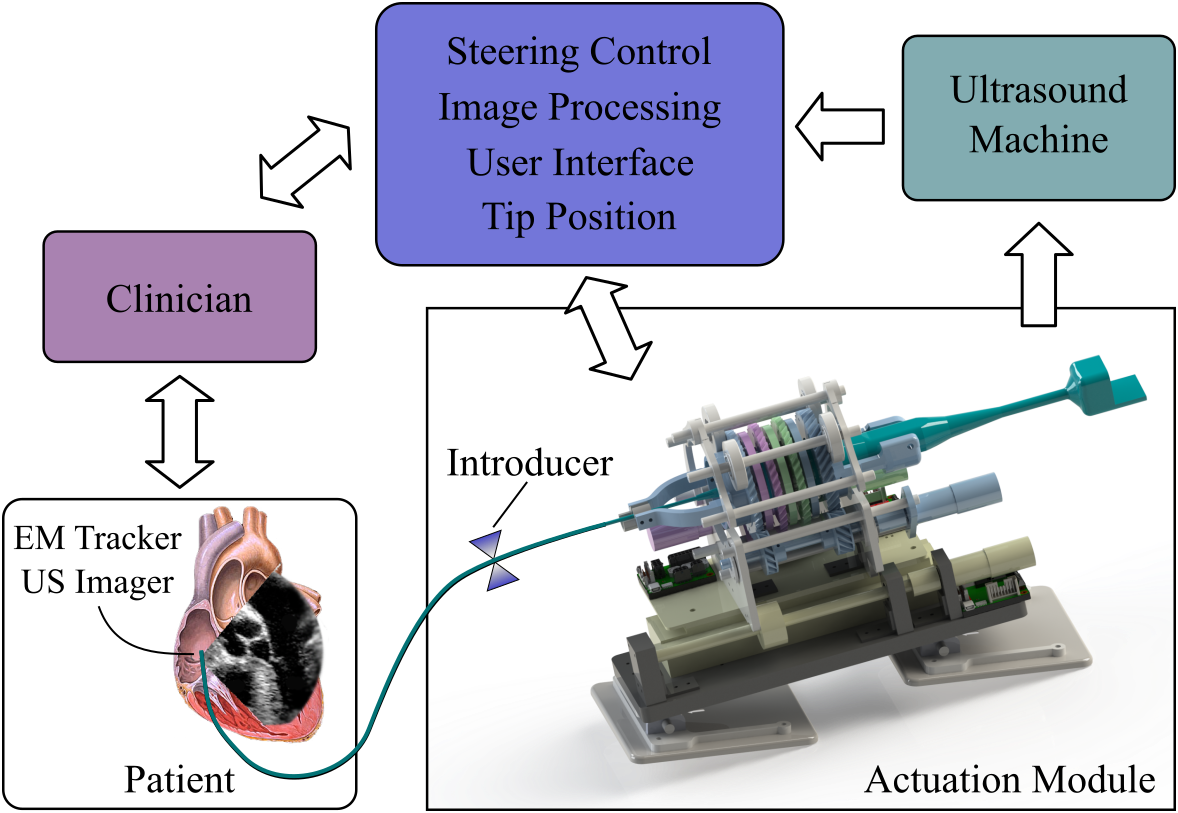
A robotic system for automatic ultrasound imaging during beating heart surgery can increase situational awareness, improve workflow, reduce procedure times, and reduce complications. This system steers an ultrasound imager in the tip of a steerable catheter to automatically image cardiac structures or working instruments inside the heart. Steering is controlled by using a closed-form solution for forward and inverse kinematics that calculates the direction of the side-facing ultrasound imaging plane. Our system is capable of accurate position control, angular adjustments, and instrument tracking. Alperen Degirmenci, Paul Loschak, Laura Brattain
 Robotic Catheter
Robotic Catheter
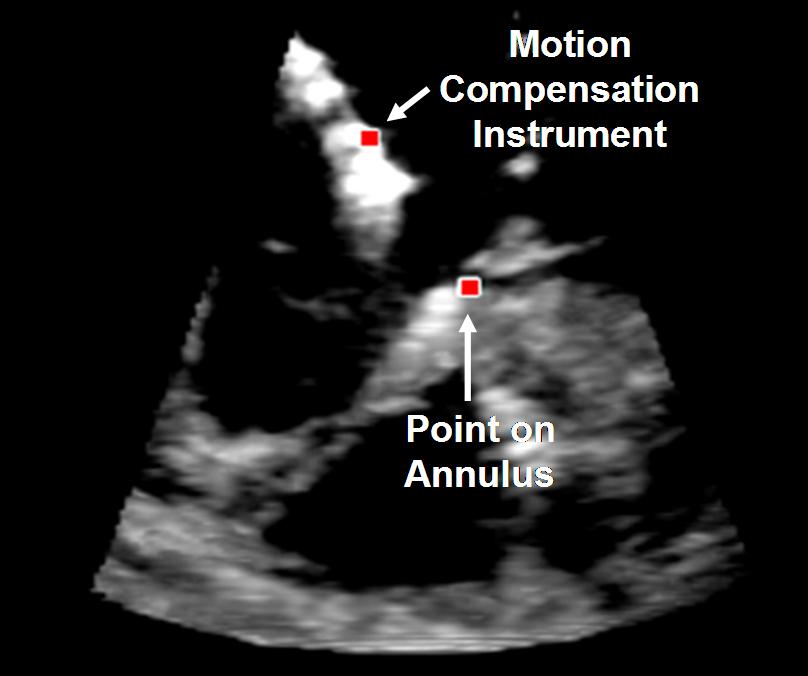
The goal of the robotic catheter project is to develop a platform technology to enable minimally invasive surgery on the inside of the beating heart. The system uses real time 3D ultrasound imaging to control an actuated catheter to compensate for the fast tissue motion. This motion compensation virtually stabilizes the heart motion and allows clinician to perform surgical repair as if the heart was stopped. Samuel Kesner
 3D Ultrasound-Guided Robotic Motion Compensation
3D Ultrasound-Guided Robotic Motion Compensation
We have developed a 3D ultrasound-guided motion compensation system that tracks heart motion and allows the surgeon to operate on the fast moving structures of the beating heart without risk of damaging them. This involves real-time processing of 3D ultrasound volumes and the use of an Extended Kalman Filter (EKF) to remove the effects of delay in the imaging system. Shelten Yuen
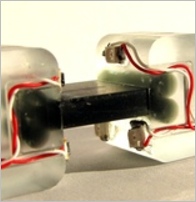
Jamming Structures
There are two major paradigms in robotics: soft robots and traditional rigid robots. Soft robots are typically made of flexible, shock-absorbing materials and are used in systems requiring adaptivity and safety, such as wearable devices. Traditional rigid robots are typically made of stiff, energy-conserving materials and are used in systems requiring high forces, speed, and precision, such as manufacturing equipment. Our project aims to bridge the gap between soft and traditional robots by investigating mechanisms that allow robots to switch between the two paradigms on command. Recently, our work has focused on jamming, a phenomenon in which a collection of elements exhibits remarkable changes in mechanical properties when a pressure gradient is applied. Through a combination of mechanical modeling, finite-element simulation, and experimentation, we have shown that jamming structures can enable a new class of versatile robots that can neither be classified as "soft" or "rigid." Buse Aktas, Yashraj Narang
- Tunable Stiffness
Jamming structures can be used as tunable-stiffness elements. When vacuum is off and a small load is applied to a laminar jamming structure, the structure deforms significantly. When vacuum is on and a large load is applied, the structure deforms negligibly. In fact, when vacuum is applied to a layer jamming structure with just 32 thin layers, the stiffness of the structure can increase by a factor of 1000.
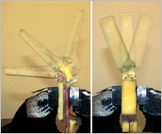
- Shape Locking
When vacuum is off, laminar jamming structures can be deformed into arbitrary shapes. When vacuum is on, the structures then preserve their shape. Integrating laminar jamming structures into soft robots can enable the robots to exhibit shape-locking capabilities.
- Variable Damping
Laminar jamming structures can be used as landing gear for quadcopters. When no vacuum is applied, the laminar jamming structures are compliant, and when the quadcopter lands, the chassis strikes the ground. When moderate vacuum is applied, the jamming structures are stiff and can act as shock absorbers. When high vacuum is applied, the jamming structures cannot deform, and the quadcopter bounces. Moderate vacuum is optimal for the given landing velocity.
Rehabilitation Robotics
Stroke and post-operative upper-limb injury patients require continuous rehabilitation to regain normal motor function. Our research focuses on developing cable-driven, wearable rehabilitation devices that can help doctors monitor patient progress and can provide robot-assisted physical therapy both in clinic and at home.
 Soft Orthotics
Soft Orthotics
Design of a lightweight, cost-effective, shoulder rehabilitation device that adapts to anatomical variations in the patient's upper body. This device integrates cable driven actuation and a limb position sensing system to: i) provide passive and active exercises to the arm tailored to the user’s specific shoulder disability and ii) assist in diagnosis and in monitoring patients’ progress.
Ignacio Galiana, Frank Hammond III, Samuel Kesner, Leif Jentoft, and Marko Popovic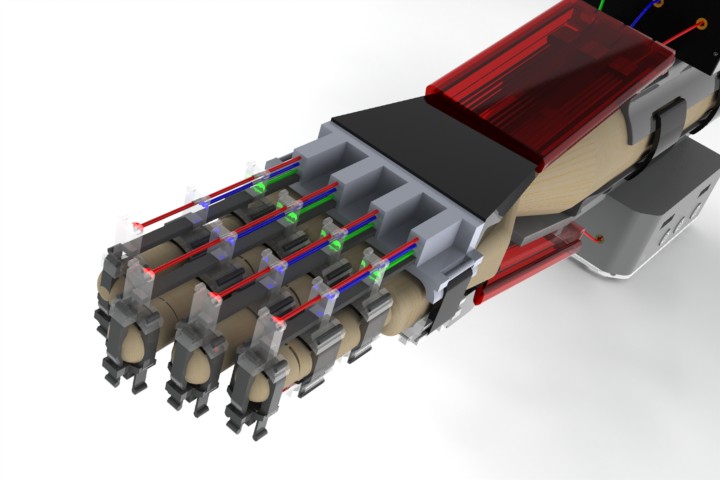 Hand Therapy Exercise Device
Hand Therapy Exercise Device
We aim to develop a simple, cost-effective hand rehabilitation device using a unique combination of cable actuation and passive return elements. The device will be capable of replicating all of the therapy exercises that are currently performed by occupational therapists on patients. Raye Yeow
Robotic Hands and Tactile Sensing
Current robotic hands are complicated, fragile, and expensive. This limits their use in unstructured environments such as homes, outdoors, and disaster zones. Our research focuses on addressing these problems through several approaches, including the use of mechanical intelligence such as compliant joints, numerical optimization to reduce the complexity of hand actuation, and the side-by-side development of low-cost, robust sensors and perception and grasping algorithms to enable autonomous operation.
 Dexterous Manipulation
Dexterous Manipulation
Robotic hands are important for tasks in many domains, from warehouses to disaster zones to peoples homes. However, current industrial grippers lack dexterity and generality, and anthropomorphic research hands are expensive, fragile, and difficult to control. A task-centric design methodology holds considerable promise to deliver inexpensive, robust hands. Leif Jentoft, Yaroslav Tenzer, Qian Wan
 Intelligent Passive Mechanics
Intelligent Passive Mechanics
Grasping involves contact between many different surfaces with messy interaction forces and couplings. Through the use of carefully-chosen passive mechanical designs, it is possible to greatly simplify the control problems to improve performance, decrease expense, and improve the mechanical robustness of robotic hands. Leif Jentoft, Frank Hammond III
 Numerical Optimization of Robotic Hands
Numerical Optimization of Robotic Hands
The design of robotic hands for dexterous grasping and manipulation often leads to fully-actuated, anthropomorphic (biomimetic) solutions. These solutions, however elegant, typically entail complex actuation frameworks that make them expensive and difficult to implement effectively. This research uses novel grasp simulation and design optimization methods to systematically reduce the complexity and cost of robotic hands while promoting improved hand dexterity and grasp robustness. Frank Hammond III
 Compliance and Sensing
Compliance and Sensing
Compliant joints provide a number of advantages for grasping, but they also open new approaches to sensing. They enable gentle interactions even with low-bandwidth, position-controlled hands, and have few blind spots. We have developed new sensors to measure the deflection of compliant flexure joints, and algorithms to use them to determine object geometry and contact forces. Leif Jentoft
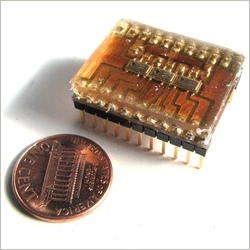 Tactile Sensing and Perception
Tactile Sensing and Perception
Although the human hand has a very capable sensor suite, thirty years of benchtop research have failed to deliver tactile sensing suites that are robust and inexpensive enough to provide grasping information at a practical cost/benefit ratio. We are developing hardware that is inexpensive, robust, and matched to the capabilities of robotic rather than biological fabrication techniques, and perception algorithms to process this data that are robust to the noise and uncertainty present in unstructured environments. Leif Jentoft, Yaroslav Tenzer, Qian Wan
Haptics
 Effect of Delay and Bandwidth on Haptic Task Performance
Effect of Delay and Bandwidth on Haptic Task Performance
One of the haptic devices present in the lab is the Magnetic Levitation Haptic Interface (Butterfly Haptics LLC), which features zero static friction, zero mechanical backlash, and the highest bandwidth and resolution, compared to conventional linkage-based devices. We utilized this state-of-the-art high-fidelity instrument to assess the performances of human subjects in executing haptic assembly tasks under different levels of time delay and bandwidth limitation. Raye Yeow
 Tactile Shape Displays
Tactile Shape Displays
We are developing remote palpation systems to convey tactile information from inside a patient's body to the surgeon's fingertips during minimally invasive procedures. These new instruments will contain tactile sensors that measure pressure distribution on the instruments as tissue is manipulated. The signals from these sensors will be sampled by a dedicated computer system, which will apply appropriate signal processing algorithms. Finally, the tactile information will be conveyed to the surgeon through tactile "display" devices that recreate the remote pressure distribution on the surgeon's fingertips.