Robotic catheters for beating heart surgery
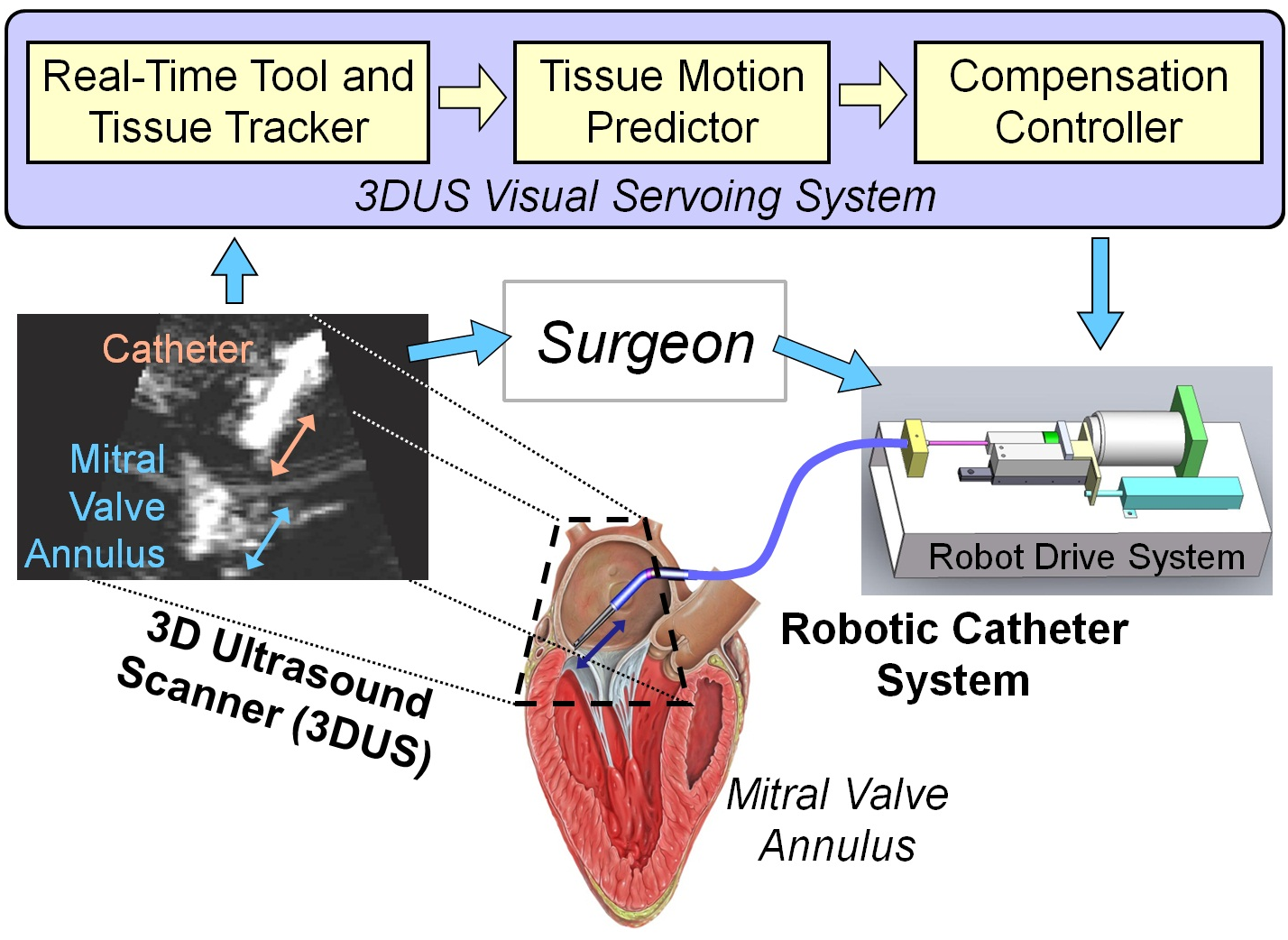
The goal of this project is to develop 3D ultrasound-guided robotic catheters for beating heart surgery. Cardiac surgery is currently an invasive procedure that often involves stopping the heart and opening the chest. The robotic catheter system removes these potential risks by allowing a robotic tool to operate on the beating heart by compensating for the fast motions using 3D ultrasound guidance. The motion compensation allows the surgeon to control the catheter to accurately repair and modify the moving structures inside the heart while it is still beating. The system uses 3D ultrasound guidance and visual servoing to control the catheter tip inside the beating heart (Fig. 1).
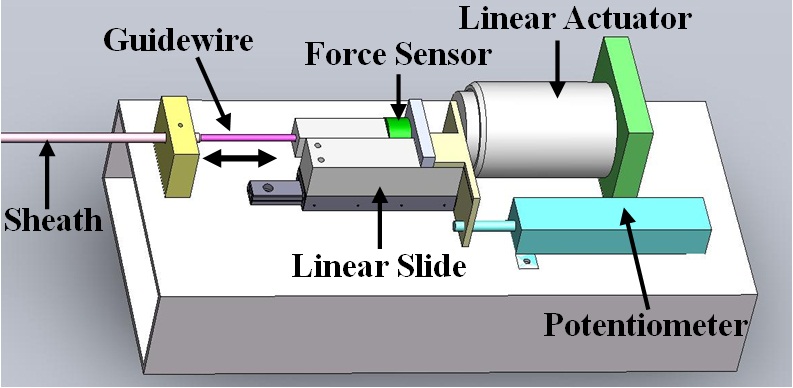
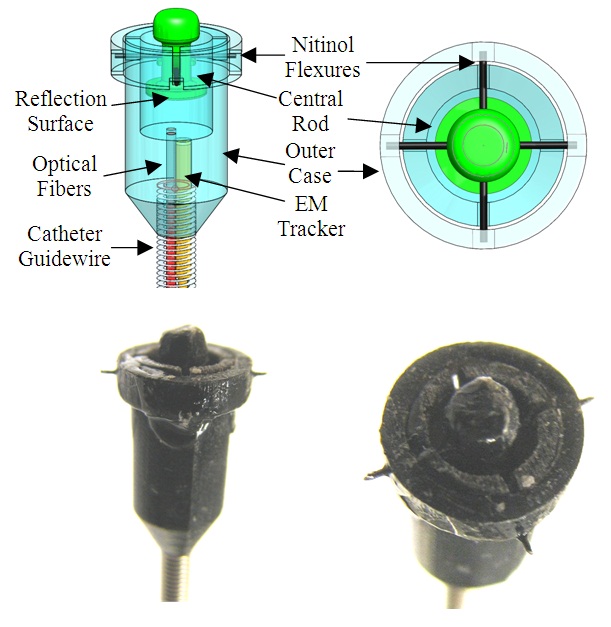
The focus of this project has been the design and control of the motion compensating robotics catheters. See the papers below for more information on the catheter system designs, including actuation (Fig. 2), catheter components, force sensors (Fig. 3), and end effectors. In order to accurately control the catheter tip position and applied forces, custom control methods were developed that compensate for the catheter performance limitations of friction and backlash. See the papers below for more information on these topics.
Publications:
IEEE Transactions on Robotics, Vol 27, No. 6, pp. 1045-1055, December 2011.
IEEE/ASME Transactions on Mechatronics, Vol. 16, No. 5, pp. 866-870, October 2011.
IEEE - World Haptics Conference 2011, June 22-24, 2011, Istanbul, Turkey.
International Conference on Robotics and Automation (ICRA), Shanghai, China, May 9 - 13 2011.
Proceedings of the 2011 Design of Medical Devices Conference 2011 (DMD2011), April 12-14, 2011, Minneapolis, MN, USA.
Proceedings of the 1st International Conference on Information Processing in Computer-Assisted Interventions (IPCAI), Geneva, Switzerland, June 23, 2010
International Conference on Robotics and Automation (ICRA), Anchorage, AK, May 2010, pages 1059-1065.