Compliance and Sensing
Using Compliant Joints to Determine Grasp Affordances
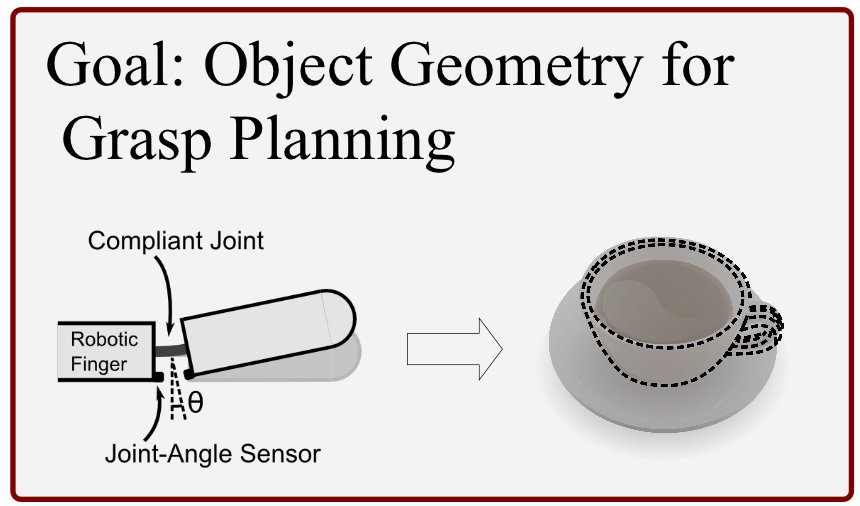 Object geometry is important for grasp planning and object classification. However, existing approaches for tactile sensors are slow and require expensive or delicate hardware.
Joint-angle sensors can be used to determine the surface geometry of a target object when used in conjunction with compliant joints. This approach is mechanically robust, inexpensive,
and requires only basic control of manipulator position (i.e. no force or impedance control).
Jentoft and Howe, IROS 2011
Object geometry is important for grasp planning and object classification. However, existing approaches for tactile sensors are slow and require expensive or delicate hardware.
Joint-angle sensors can be used to determine the surface geometry of a target object when used in conjunction with compliant joints. This approach is mechanically robust, inexpensive,
and requires only basic control of manipulator position (i.e. no force or impedance control).
Jentoft and Howe, IROS 2011
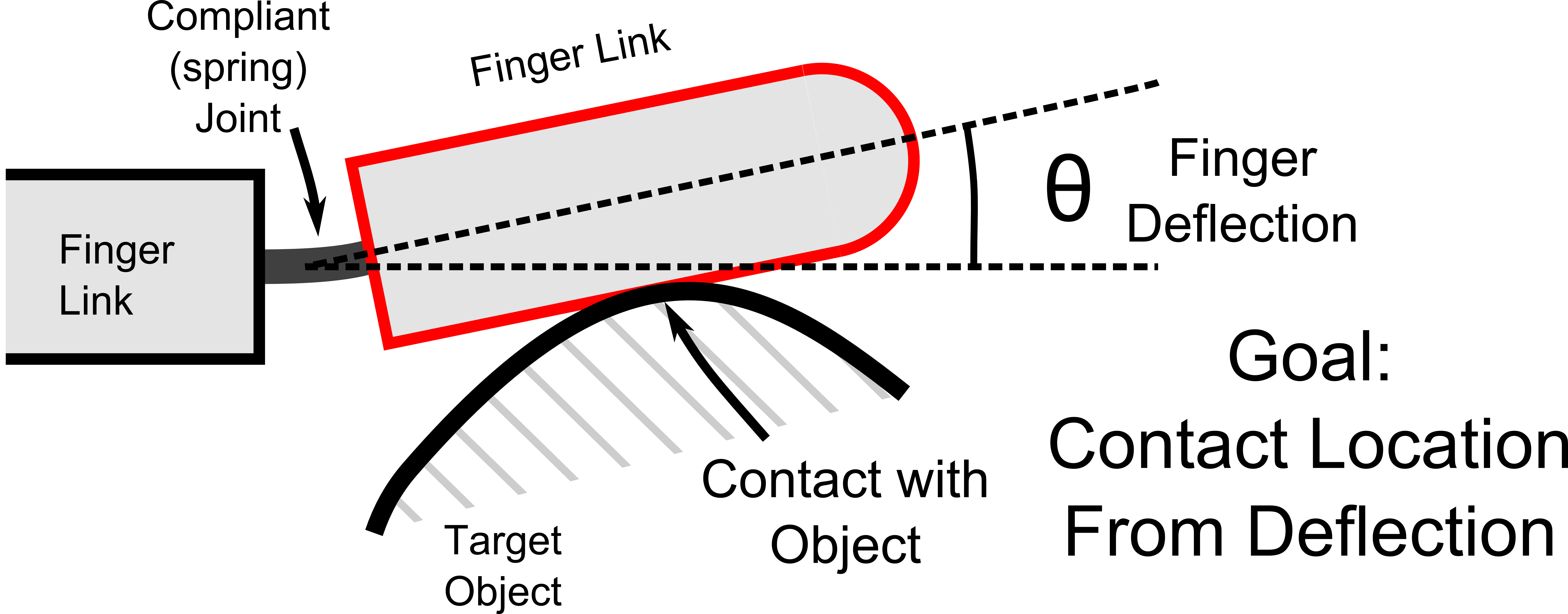 Compliance makes sensing easier by reducing the control precision required to maintain gentle contact with an object, reducing the control bandwith required to avoid sharp forces during exploration, and
increasing the robustness of the sensors. One such sensor suite is joint-angle sensors with compliant joints.
Compliance makes sensing easier by reducing the control precision required to maintain gentle contact with an object, reducing the control bandwith required to avoid sharp forces during exploration, and
increasing the robustness of the sensors. One such sensor suite is joint-angle sensors with compliant joints.
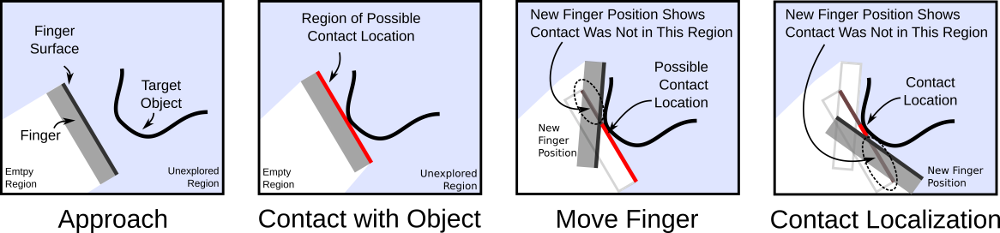
The space-sweeping algorithm proceeds as follows:
- Assume a target object is rigid under low forces, and thus does not move. Then, the finger and object cannot interpenetrate and any volume the finger has occupied cannot contain the object.
- When a finger contacts the object, the finger surface forms a closed set of possible contact locations.
- Subsequent finger motions narrow the region of potential contact down to a small region suitable for planning. Compliance in the finger makes it easy to maintain gentle contact against the object to perform this under limited control.