The i-HY Hand
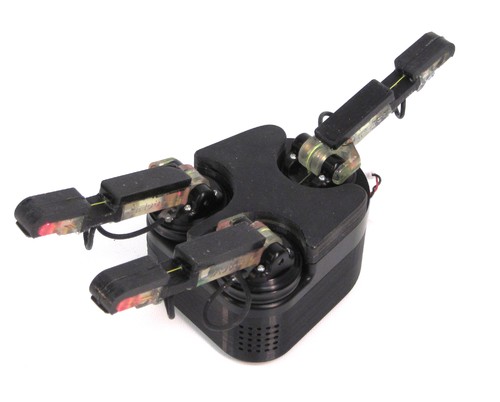
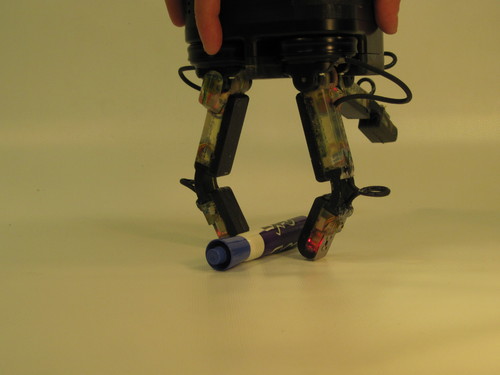
The i-HY hand was developed under DARPA's Autonomous Robotic Manipulation - Hardware Track (ARM-H) program with the goal of creating durable, inexpensive robotic hands capable of manipulation as well as grasping, suitable for use on mobile robots The novel minimalistic design of i-HY was developed by choosing a set of target tasks around which the design of the hand was optimized. This resulted in an underactuated hand that is capable of performing a wide range of grasping and in-hand manipulation tasks using only 5 motors. To develop this, the principles driving underactuated grasping were extended to in-hand manipulation, and fingers were designed that are capable of both firm power grasps and low- stiffness fingertip grasps using only the passive mechanics of the finger mechanism. Experimental results demonstrate successful grasping of a wide range of target objects, the stability of fingertip grasping, as well as the ability to adjust the force exerted on grasped objects using the passive finger mechanics. The project was a collaboration between iRobot, Harvard University, and Yale University.