Tactile Shape Displays for Small Scale Shape Feedback
Parris Wellman, Bill Peine, R. D. Howe
Support provided by the Whitaker Foundation
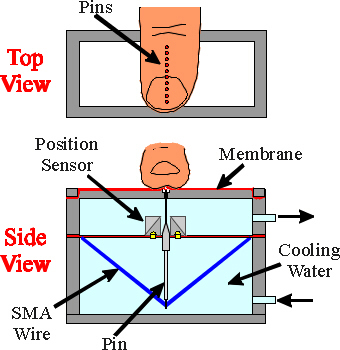
The tactile display in our prototype system consists of a line of 10
individually actuated pins that are raised against the fingerpad.
Shown below is a drawing of our design. A line configuration
was chosen since the palpation instrument will be scanned across the tissue
allowing motion to provide the other dimension. This also simplifies
the design. SMA wires are used to drive the pins. As electric
current heats the wire, it goes through a phase transformation and shortens,
thus pushing the pin up. With this design, each pin can move 3 mm
and produce over 1 N of force. A primary problem with SMA is the
slow response times. We overcame this by using water cooling and
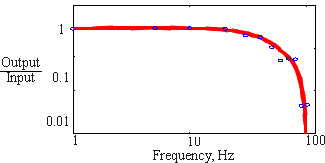
position feedback for each pin from optical sensors. Figure
5 shows the response of the pin as a function of desired position frequency.
The output displacement drops by 30% (-3 db point) at 40 Hz. This
satisfies the design specification set by the finger speed experiments.
 |
 |
Related Publications
Peine, W.J., Wellman, P.S., and Howe, R.D., Temporal Bandwidth Requirements for Tactile Shape Displays, Proceedings of the IMECE Haptics Symposium, Dallas, TX, November 1997.Wellman, P.S., Peine, W.J., and Howe, R.D., “Mechanical
Design and Control of a High-Bandwidth Shape Memory Alloy Tactile Display,”
proceedings of the International Symposium of Experimental Robotics,
Barcelona, Spain, June 1997.
Also see Simulating Soft Tissue with a Tactile Shape Display