Remote Palpation Instruments for Minimally Invasive Surgery
Bill Peine, Jae Son, R. Howe
Support provided by the Whitaker Foundation
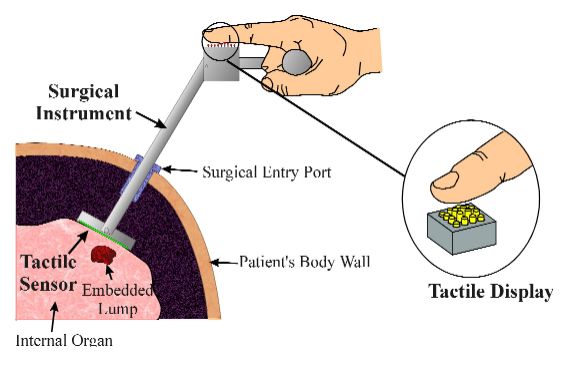
We are developing remote palpation systems to convey tactile information from inside a patient's body to the surgeon's fingertips during minimally invasive procedures. These new instruments will contain tactile sensors that measure pressure distribution on the instruments as tissue is manipulated. The signals from these sensors will be sampled by a dedicated computer system, which will apply appropriate signal processing algorithms. Finally, the tactile information will be conveyed to the surgeon through tactile "display" devices that recreate the remote pressure distribution on the surgeon's fingertips. Creation of remote palpation technology will increase safety and reliability in present minimally invasive procedures, and bring the advantages of minimally invasive techniques to other, more complex procedures, which are not possible today.
The proposed project has two parts. The first is analysis of the mechanical interactions between the tactile sensors and various tissues, and between the tactile display device and the surgeon's finger tip. Research tasks include:
- Observation of surgeons as they palpate tissue, and experiments to measure typical finger motions, speeds, and forces used during palpation procedures
- Biomechanical measurements to characterize the human fingerpad, organ tissues, and tumors
- Development of solid mechanics models of these materials and their interactions in palpation
- Measurement of the limits of human tactile detection capabilities in palpation tasks
- Specialized tactile sensors
- Signal processing algorithms
- Tactile display devices
- Integrated surgical instruments
Palpation Instrument Design
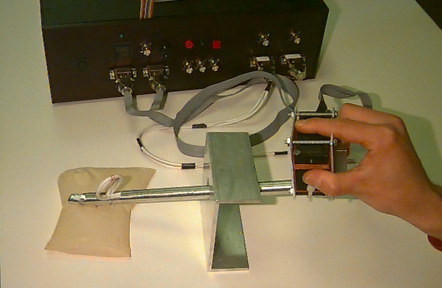
The target application for our remote palpation technology is lump localization in minimally invasive thoracic surgery. In this procedure, hard nodules in the lung must be localized for excision. This is trivial using traditional palpation with the fingers because the nodule is much stiffer than the surrounding lung tissue. Using minimally invasive techniques; however, the process can be frustrating and time consuming. The development of a remote palpation instrument that maps the surgeon's finger motions to the instrument tip while providing tactile feedback will decrease localization times. A prototype palpation instrument (shown below) was constructed. It consisted of the tactile array sensor on the instrument tip, the shape display against the surgeon's finger, and a cable drive mechanism to couple the motions of the surgeon's finger to the instrument tip. An early version of this device was tested in a surgical setting using a pig. Many important design requirements were learned which will be incorporated into the next generation instrument currently under construction.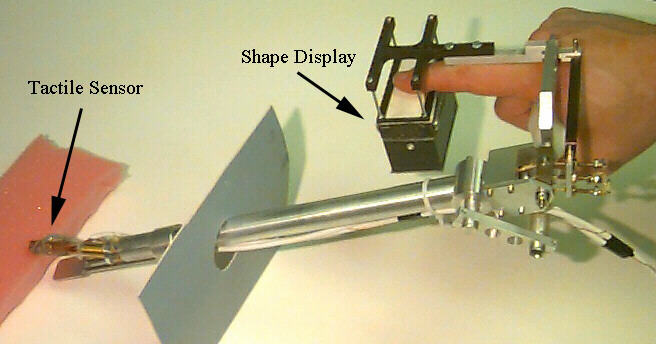
 |
 |
Signal Processing Development
Signal processing is an integral part of a remote palpation system that provides realistic tactile feedback. A detailed understanding of the mechanical interactions that occur while using the instrument is required to generate appropriate drive commands for the display from the tactile information gathered by the sensor. As a first step toward the design of a general signal processing algorithm, we developed a control scheme to simulate compliant tissues using the shape display and an actuated positioner. This method models the mechanical interaction between the finger and tissue using Hertz contact theory. The nonlinear stiffness of the fingerpad is also included. This allows calculation of the indentation and deformation of the tissue and fingerpad using real time control techniques.Finite Element Models of Sensor-Tissue Interaction
To interpret the information collected by the tactile sensor in a remote palpation system, it is useful to model the contact interaction between the sensor and the tissue. The expected pressure readings from these models will aid in the development of signal processing algorithms. Developing accurate models is difficult due to the complexity of this mechanics problem. The models need to include time-dependent nonlinear material properties and adequately handle sliding contact and the high strain levels. We developed finite element models for this purpose. The models consist of a soft tissue with a hard inclusion. The stiff sensor is indented into the rubber and the contact pressure distribution is calculated. These models were used to determine how the pressure distribution changed as the size, depth, and relative stiffness of the inclusion was varied.Related Publications
>Pawluk, D.T., Son, J.S., Wellman, P.S., Peine, W.J., and Howe, R.D., “A Distributed Pressure Sensor for Biomechanical Measurements,” Journal of Biomechanical Engineering, in press.Peine, W.J., Kontarinis, D.A., and Howe, R.D., “A Tactile Sensing and Display System for Surgical Applications,” Interactive Technology and the New Paradigm for Healthcare, Eds. R. Satava, K. Morgan, H. Sieburg, R. Mattheus, and J. Christensen, IOS Press, Washington, D.C., pp. 283-288, 1995.
Howe, R.D., Peine, W.J., Kontarinis, D.A., and Son, J.S., “Remote Palpation Technology for Surgical Applications,” IEEE Engineering in Medicine and Biology Magazine, 14(3):318-323, May/June 1994.
Peine, W.J., Son, J.S., and Howe, R.D., “A Palpation System for Artery Localization in Laparoscopic Surgery,” proceeding of the First International Symposium on Medical Robotics and Computer Assisted Surgery, Pittsburgh, PA., August 1994.
Peine, W.J., Kontarinis, D.A., and Howe, R.D., “A Remote Palpation System for Minimally invasive Surgery,” poster presented at the Sixth International Meeting of the Society for Minimally Invasive Therapy, Berlin, Germany, October 1994. (Winner of the Jenoptik Innovation Award for the best scientific presentation.)
Pawluk, D.T., Peine, W.J., Wellman, P.S., and Howe, R.D., “Simulating Soft Tissue with a Tactile Shape Display,” to appear in the proceedings of the IMECE Haptics Symposium, Dallas, TX, November 1997.
P.S. Wellman and R.D. Howe, “Modeling probe and tissue interaction for tumor feature extraction,” presented at ASME Summer Bioengineering Conference, Sun River, Oregon, June 1997.