World Modeling by Tele-Manipulation
T. Debus*, P. Dupont*, R. Howe**
*Robotics, Dynamics and Control Laboratory, Boston University
**Biorobotics Laboratory, Harvard University
Support provided by The National Science Foundation
| MOTIVATION Teleoperation is the ideal method to perform sophisticated tasks in unknown environments. In this control mode, all the operator�s actions are based on his/her interpretation of the camera images. In many cases, however, humans are not good at quantification and cannot interpret this visual information in an exact manner, prohibiting them from designing the correct strategy. |
 |
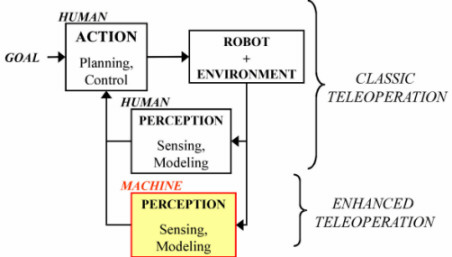 |
Proposed Solution The proposed solution is to create a modeling system that will use sensor information (i.e., machine perception) used for control purposes to determine the properties of the objects and environment as the task progresses. One practical application is a teleoperator assistant that can provide information to the operator in real time during task execution. This includes quantitative measurements such as the size, shape, and orientation of objects; these properties can, for example, help determine appropriate insertion strategies in teleoperated assembly task. |
| The Overall Approach |
 |
How to Identify Object properties? To estimate first order geometrical properties (i.e., dimensions, normal) two approaches can be used: 1) a non-contact sensing or image processing approach 2) a contact sensing or probing approach. In this research we have favored contact sensing techniques due to their robustness. |
| Algorithm used to Automatically Identify Object Properties To automatically identify object properties, two basics and essential concepts are used: 1) every task can be described as a network of states 2) properties are only measurable in certain states. Based on these two concepts, a framework has been developed to reduce the overall problem to three sub-problems: Task decomposition: The operator decomposes the task into a minimal sequence of subtasks characterized by their contact states geometry and associated sets of properties. Data segmentation: Given a task decomposition and the sensor data stream, find the time intervals corresponding to each subtask. Property estimation: Given the time intervals associated with each subtask, estimate the desired properties. | 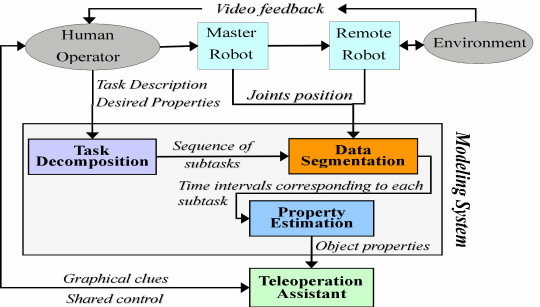 |
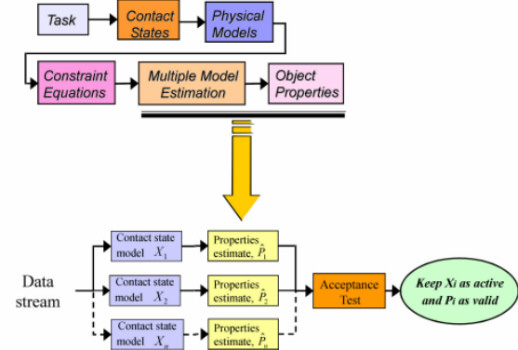 |
The Mathematical Approach: Constraint Equations and
Multiple Model Estimation In order to stay in contact with the environment the robot�s wrist has to be constrained. Moreover, how the wrist is constrained can be a unique characterization of the contact state. This can be modeled thru physical models using constraint equations parameterized by sensing data and object properties. Once a mathematical model is built for each contact state, a multiple regression algorithm is used to estimate all the properties associated with all the contact states. Based on the quality of the estimates an acceptance test decides if a contact is active or not. Once we know which contact is active we can keep the associated estimated properties. |
To get more detailed information on the techniques used to automatically identify remote object properties, here is a list of references.
References
T. Debus, P. Dupont and R.D. Howe (2000). "Automatic Indentification of Local Geometric Properties During Teleoperation." Proceedings of the IEEE International Conference on Robotics & Automation, San Francisco, April 2000, pp. 3428-3434.
T. Debus, J. Stoll, R. D. Howe, and P. Dupont (2000). "Cooperative Human and Machine Perception in Teleoperated Assembly." in D. Rus and S. Singh, eds., Experimental Robotics VII. The Fifth International Symposium, Honolulu, HI, December 10-13, 2000, Lecture notes in control and information sciences, Springer-Verlag, Berlin, in press.
T. Debus, P. Dupont and R.D. Howe (1999). "Automatic Property Identification via Parameterized Constraints." Proceedings of the IEEE International Conference on Robotics & Automation, Detroit, May 1999, pp. 1876-81.
P. Dupont, T. Schulteis, P. Millman, and R. D. Howe (1999). "Automatic Identification of Environment Haptic Properties." Presence 8(4), pp. 392-409, August 1999.
R. Howe, T. Debus and P. Dupont (1998). "Haptic Identification of Remote Environment Properties." SPIE International Symposium on Intelligent Systems and Advanced Manufacturing, Proceedings of the SPIE Vol. 3524, Boston, MA, November, 1998.