Mechanics of the Human Fingerpad
Dianne T.V. Pawluk, R. D. Howe
We investigated the dynamic response of the human fingerpad in vivo to a compressive load. A flat probe indented the fingerpad at a constant velocity, then held a constant position. The resulting force (0 - 2 N) increased rapidly with indentation, then relaxed during the hold phase. A quasi-linear viscoelastic model (Fung 1993) successfully explained the experimental data. The instantaneous elastic response increased exponentially with position, and the reduced relaxation function included three decaying exponentials (with time constants of approximately 4 msec, 70 msec and 4 sec) plus a constant. The model was confirmed with data from sinusoidal displacement trajectories.
To find the dynamic pressure distribution across the fingerpad, a tactile array sensor was mounted on the probe, and the finger was indented with the same ramp-and-hold and sinusoidal displacement trajectories. The local pressure variation exhibited nonlinear stiffness (exponential with displacement) and significant temporal relaxation, as with the total force. The shape of the contact pressure distribution could plausibly be described by an inverted paraboloid. A model based on the contact of a rigid plane (the probe) and a linear viscoelastic sphere (the fingerpad), modified to include a nonlinear modulus of elasticity, can account for the principal features of the distributed pressure response.
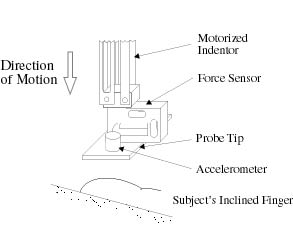
Indentor apparatus
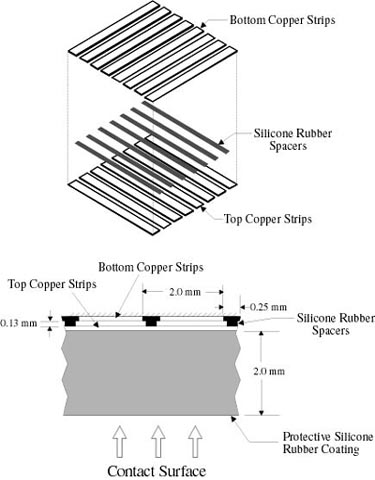
Tactile array sensor construction
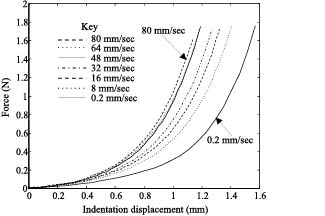
Total force-indentation relationship is exponential,
and becomes approximately constant for ramp speed above about 48mm/s.
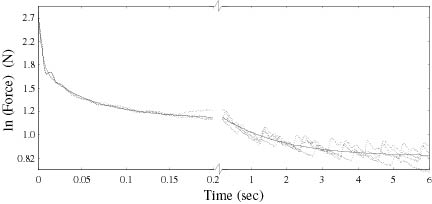
Total force relaxes during constant-position
phase. Peaks at about 1Hz are due to blood pressure variation.

Pressure contours at four force levels during
rapid indentation.
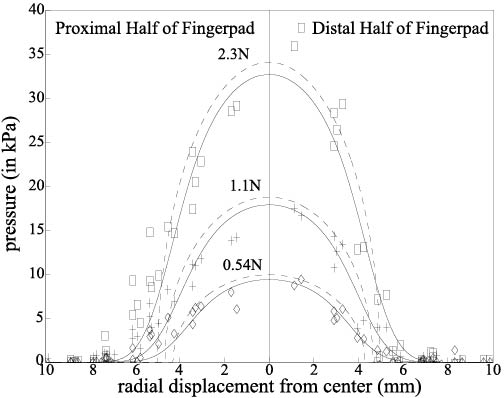
Pressure data fit to mechanics model based on Hertz pressure distribution.