Semi-Autonomous Localization of the Internal-Mammary Artery using a Tactile Sensor Array
Ryan Beasley and R. D. Howe, Ph.D.
Funding: Partial funding was provided by The Ford Foundation. Additional funding was provided by CIMIT (Center for Integration of Medicine and Innovative Technology)
|
Abstract:
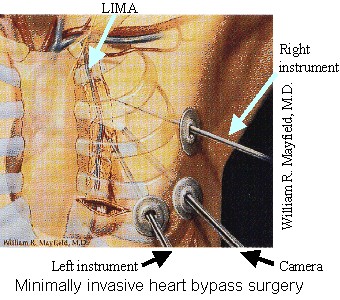
Minimally-Invasive Coronary Artery Bypass Grafting induces less patient trauma than open-chest surgery but takes longer because of the increased complexity. Artery dissection is one task noticeably affected by the complexities of minimally-invasive surgery (MIS). To decrease the time necessary to dissect arteries in MIS, we proposed the application and improvement of surgical robotics. Commercial surgical robot systems attempt to reduce the complexity of MIS by providing various aids to the surgeon, such as input scaling or image guidance. Unfortunately, there is a lack of literature on artery localization in robot-assisted MIS. For this work, tactile imaging was utilized for artery localization. |
Past Work:
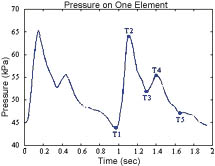
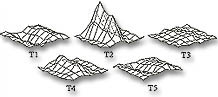
| Our tactile sensors had previously been used to detect the spatial and temporal pressure distribution from the pulse of a human wrist. The plot to the left shows the pressure response of one element of the array directly over the artery. The plots in the middle show the spatially distributed pressures across the entire array at various time instances. At the right is the pressure profile "movie". Using a 10x1 array of pressure sensels moved by a Phantom robot (Sensable Technologies Inc., Woburn, Massachussetts), a lab study was performed to validate tactile tracking of arteries. The system was able to track a pneumatically pressurized piece of latex tubing as well as transcutaneously track a human radial artery. That work, Tactile Tracking of Arteries in Robotic Surgery, was presented at the International Conference on Robotics and Automation 2002. |
Current Work:
While performing these experiments, it became obvious that kinematic errors could limit the usefulness of this method. The forces exerted between the sensor and the tissue model were large enough to bend the instrument shaft, causing significant kinematic errors. During surgery, such errors could result in position controller instability and in erroneous image guidance. The next step was to evaluate the feasibility of Uncalibrated Visual Servoing (UVS) in which images or endpoint measurements can be used to continually estimate the system's Jacobian without resorting to calibration motions. Unfortunately, the Jacobian estimate can accrue errors if the system moves in a single direction for a significant distance. It is unclear how to combine or compare the estimate with a priori knowledge, so trusting UVS for surgical applications is difficult.
The synopsis of this work is that teleoperated tactile tracking of arteries is feasible as long as the position of the tactile sensor can be measured and, for IMA take-down, the forces exerted on the patient's chest wall are small enough that they do not change the shape/positioning of the ribcage. Performing this tracking in a semi-autonomous manner would be possible if the sensor could be positioned accurately. For the target application, accurate positioning is impeded by the presence of kinematic errors due to unmodeled forces/torques on the non-ideal links/joints. Accurate positioning in the presence of kinematic errors is on-going work.