Effect
of link and joint flexibility in a teleoperated robot
Mahdi
Tavakoli PhD, Robert Howe PhD
Biorobotics Laboratory,
Harvard University
Support
Provided by National Science Foundation, National Institutes of Health,
and Natural Sciences and Engineering Research Council of Canada.
Motivation
In applications such as space and surgical robotics, the use of thin, lightweight manipulators and cable-driven end effectors results in link and joint flexibility of the manipulator. In bilateral teleoperation, however, any flexibility in a link or joint of the robot reduces the effective stiffness of the slave and the transparency of teleoperation.
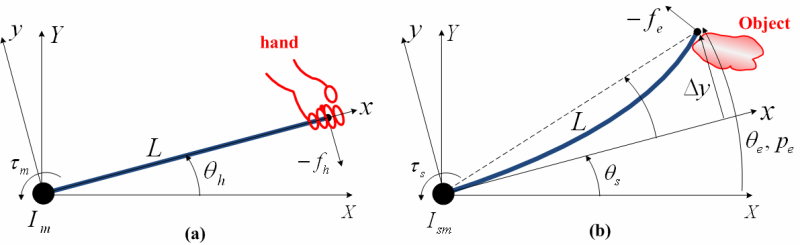
(a) The rigid master; (b) the
flexible-link slave.
In this research, we analyzed master-slave teleoperation transparency under slave robot joint and link flexibility, and evaluated the added benefits of using extra sensors at the end-effector of the flexible robot.

Models of the operator, master,
flexible slave, and environment.
Velocity (or position) feedback from the tip of the flexible robot improves free-space position tracking performance, which in the absence of such feedback is hampered by the system's anti-resonance. It is of practical interest to maintain good position tracking bandwidth in order to enable accurate and fast manipulation. Also, when the interaction forces with an environment are measured by a force sensor and fed back to the user’s hand, tip velocity feedback improves hard-contact force tracking bandwidth. This is important because if force tracking response is bandlimited, the system will not be able to accurately simulate high-frequency haptic phenomena such as edges or surface texture of an object. Moreover, the flexiblity in the joint or link will be transmitted to the user during a hard contact task unless tip velocity feedback is used. The significance of this result is in the fact that if the robot flexibility is transmitted to the user, it will limit the perception of hitting a hard object (such as bone) and will make it more difficult to utilize haptic cues for soft-tissue stiffness discrimination. This has direct consequences, for example, in tissue palpation as a means to detect cancerous tissue, which has a different stiffness compared to healthy tissue.
References
[1] M. Tavakoli and R.D. Howe, The
Effect of Joint Elasticity on Bilateral Teleoperation, In
Proceedings of the 2007 International Conference on Intelligent Robots
and Systems, San Diego, CA, October/November 2007. Best Paper Award
Finalist.
[2] M. Tavakoli and Robert D. Howe, Haptic
Implications of Tool Flexibility in Surgical Teleoperation, 2008
Haptics Symposium, Reno, NV, March 2008.