Active Soft Orthotic System for Shoulder Rehabilitation
Introduction
Stroke is the leading cause of long-term disability in the United States, affecting over 750,000 people annually. In order to regain motor function of the upper body, patients are usually treated by regular sessions with a dedicated physical therapist. However, the use of therapists is expensive, in high demand, and requires the patient travel to a rehabilitation clinic.
We propose an inexpensive wearable upper body orthotics system that can be used at home to empower both the patients and physical therapists. The system is composed of a thin, compliant, lightweight soft orthotic device with an integrated cable actuation system that is worn over the upper body, an embedded limb position sensing system, and an actuator package.
Concept and System Design
The design goals of the active soft orthotic system for upper body rehabilitation are the following:
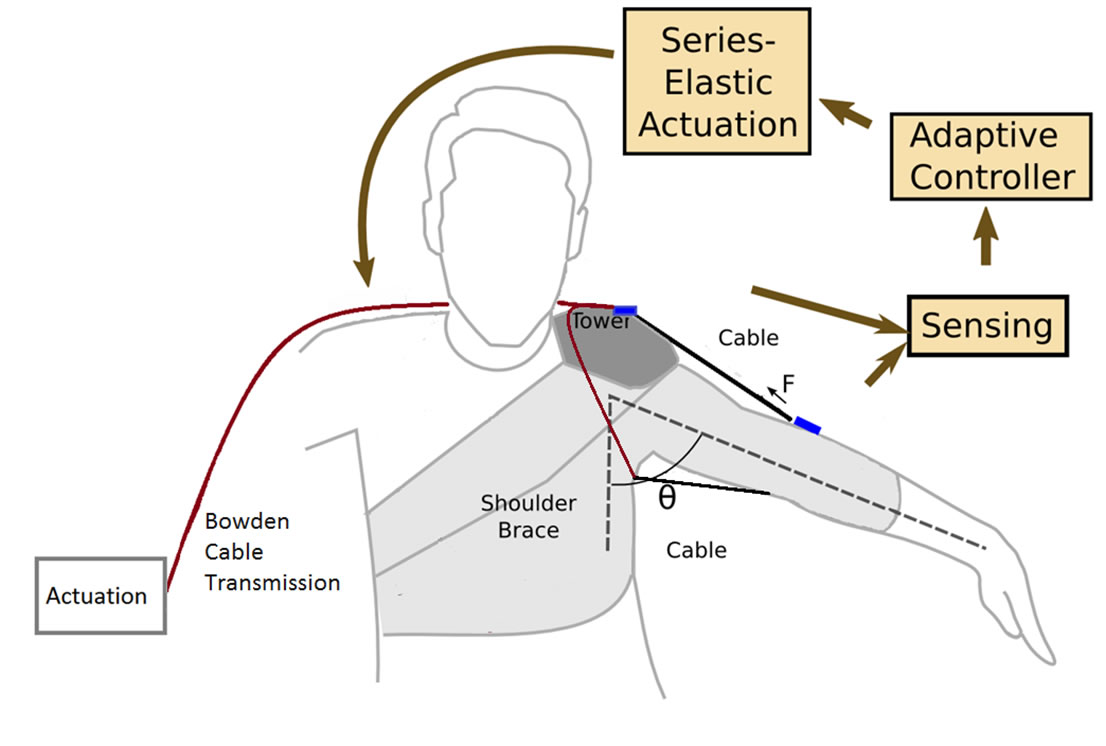
FIG.1 System Design. Actuation Package: Actuator, batteries. Transmission: Bowden Cables to minimize the weight of the wearable system. Sensing: Electromagnetic sensors (testing only), IMUs or Piezo flex sensor technologies will be incorporated. Control: Adaptive control to adjust to anatomical variations and misalignments.
System Modeling and Results
a |
 |
b |
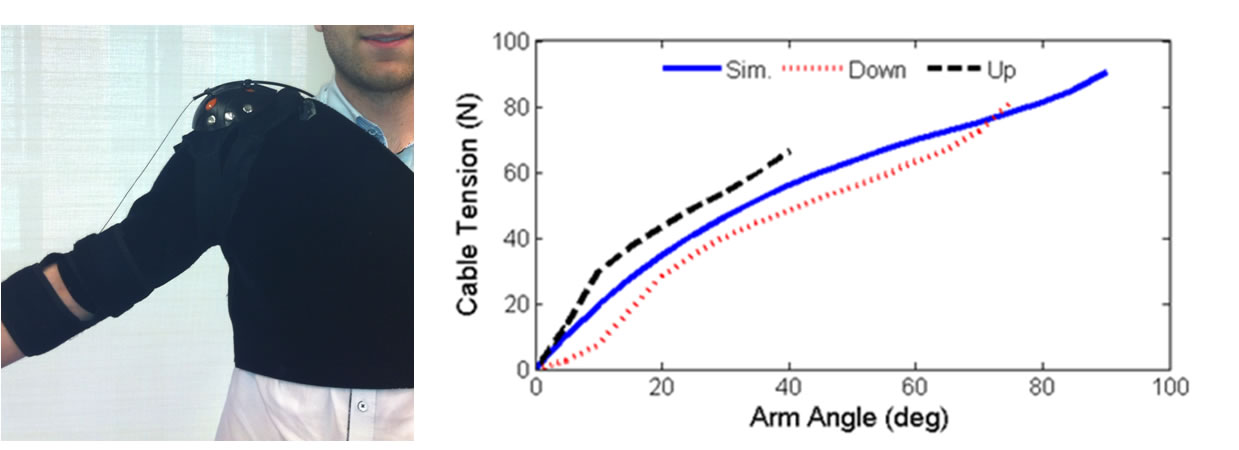 |
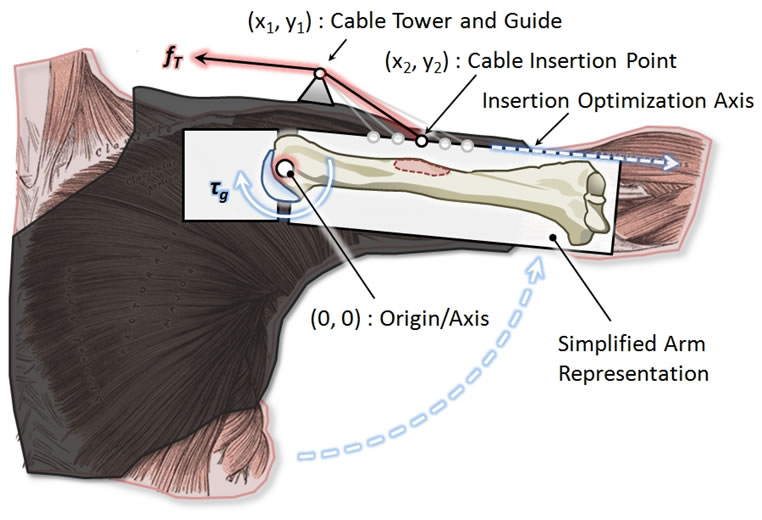
FIG.2 a. Brace parameters considered to optimize the system. b. Abduction-adduction experiment was performed to evaluate the 1 Degree of Freedom (DoF) prototype and simulation model.