Numerical Optimization of Robotic Hands
The design of robotic hands for dexterous grasping and manipulation often leads to fully-actuated, anthropomorphic (biomimetic) solutions.
These solutions, however elegant, typically entail complex actuation frameworks that make them expensive and difficult to implement
effectively. Underactuated, compliant robotic hands exploit passive mechanics and joint coupling to reduce the number of actuators
required to achieve dexterous, robust grasping in unstructured environments. While reduced actuation requirements generally serve to decrease
design cost and improve grasp planning efficiency, overzealous simplification of an actuation topology, coupled with insufficient
tuning of mechanical compliance and hand kinematics, can adversely affect grasp quality and adaptability. In this research we develop
a computational framework for systematically reduce the complexity and cost of robotic hands while promoting improved hand dexterity and grasp robustness.
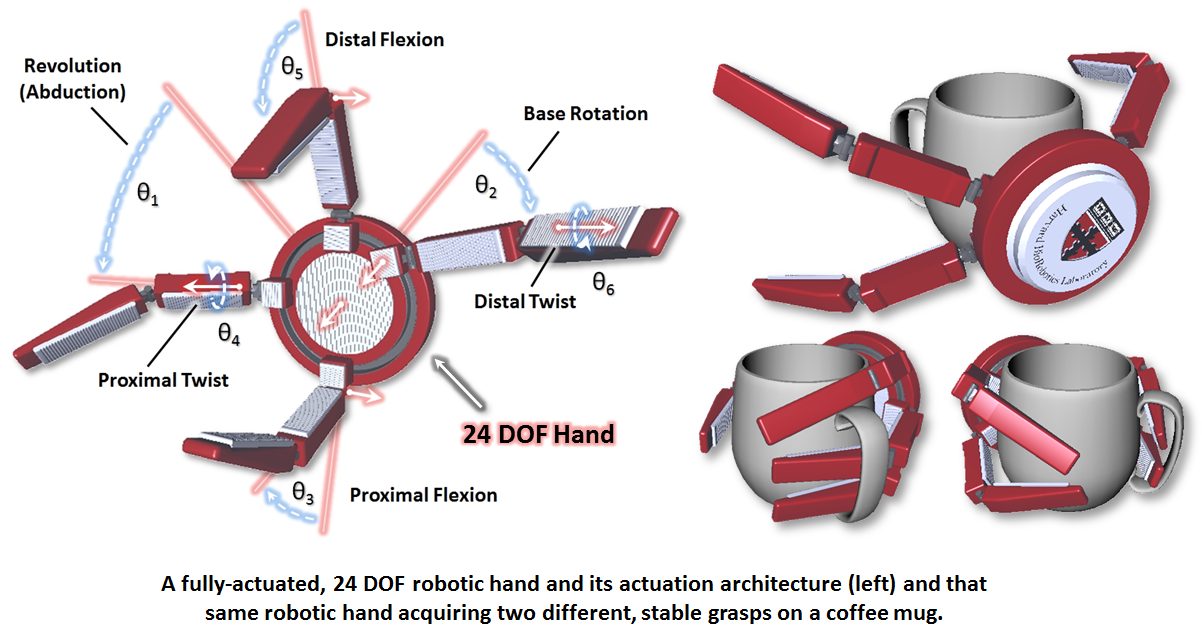
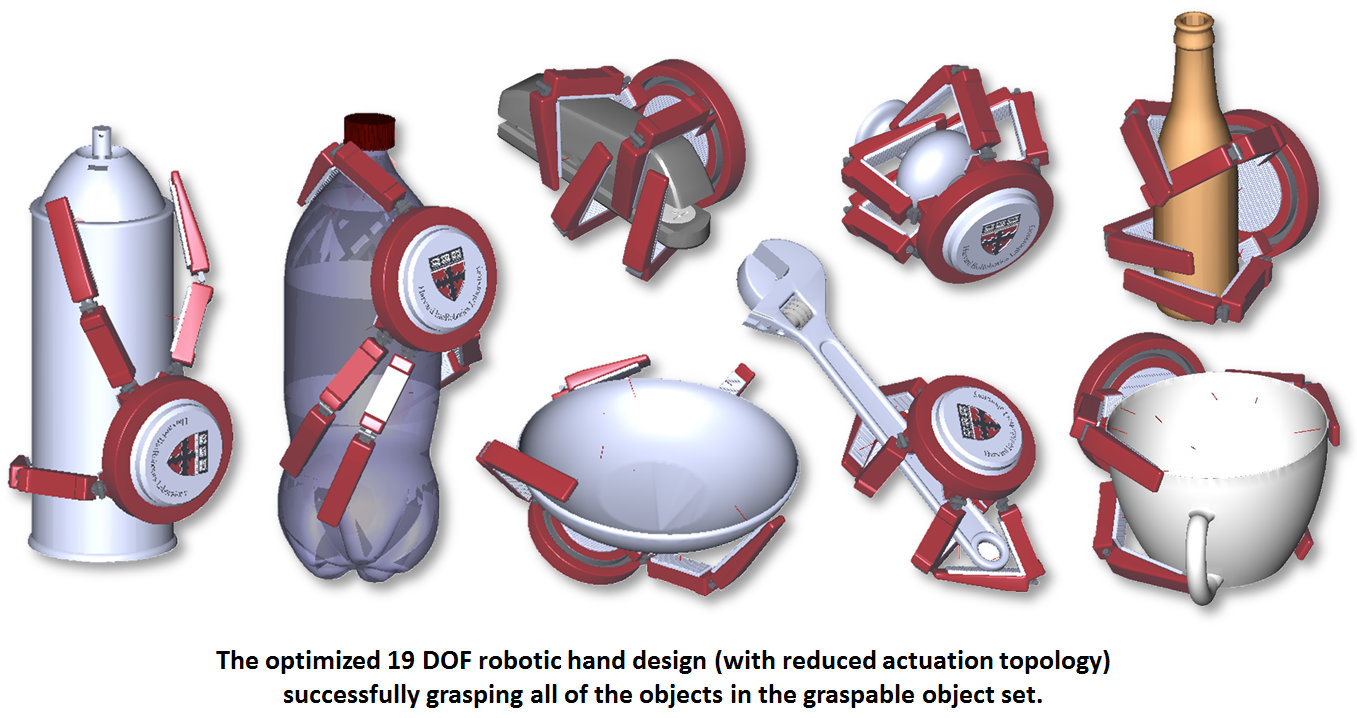
The developed actuation topology reduction (ATR) framework employs top-down, data-driven design approach that systematically demotes or removes DOFs from a fully actuated robotic hand model based upon their effective contribution to grasp robustness. By simulating several hand design variations in GraspIt! (an open-source software package developed at the Columbia Robotics Lab) and calculating grasp robustness and DOF utility across a large graspable object set, we were able to remove several DOFs from a fully-actuated hand design without compromising grasp robustness. Future work will involve varying the robot hand morphological design (numbers of digits and finger links) as well as the actuation topology to arrive at less complex, equally robust robot hand design solutions.