Study of Finger Motions and Tactile Sensations During Palpation
Bill Peine, Robert Howe
Support provided by a Whitaker
Foundation Biomedical Engineering Research Grant.
The development of effective tactile feedback systems for use in minimally
invasive surgical tools, teleoperated robotics, or virtual reality simulators
requires an indepth understanding of what humans are sensing through touch.
Measurement of Finger Speeds During Palpation
Humans have a difficult time interpreting small-scale shape information
if it is not well correlated with finger motion. For example, tactile
features will appear to change positions if the tactile feedback system
is too slow. The faster the finger is moved - the farther away from
the true position the feature is perceived. It is therefore important
to understand typical finger speeds used during palpation to specify temporal
bandwidth requirements for remote palpation systems. We performed
an experiment to measure finger speeds during a lump localization task.
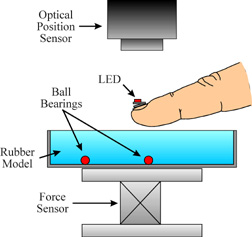
The figure on the left below shows the experimental setup. Using
palpation, subjects located embedded ball bearings in soft rubber models.
Contact forces and finger positions were measured. Average and maximum
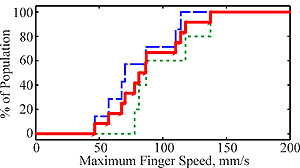
finger speeds were calculated. The figure on the right below shows
the distribution of maximum finger speeds observed. To determine
if medical training changed palpation technique, subjects included surgeons
and novices. No significant difference between the two groups was
observed. Using these results in connection with our tactile display
design, a 30 Hz temporal bandwidth is required by the tactile feedback
system to keep up with maximum velocities observed in 90% of our subject
population.
 |
 |
Measurement of Detection Limits for Sensing a Hard Lump in Soft Tissue
The ultimate goal of a remote palpation system is to provide feedback that is realistic enough that surgeons feel as if they are directly touching remote tissues. In this case, the sensitivity of the system must be equal to or greater than the sensitivity of the human sense of touch. Determining the tactile sensitivity of humans is challenging and highly depends on the type of information being detected. We performed a psychophysics experiment to measure minimum indentation forces required for subjects to just detect the presence of an embedded ball in a soft rubber material using the index finger. Once detection force levels where determined, the shape of the finger and contact pressure distribution on the finger where measured at the detection point. By varying the size of the embedded ball and determining what aspect of the mechanical stimulus (maximum pressure, skin curvature, deformation, etc.) remained constant for all cases, we could speculate what humans are sensing when detecting the presence of the ball. Our results indicate that subjects detected a change in the relative deformation of the fingerpad induced by the ball above a threshold level.
Taxonomy of Palpation
An effective design for a remote palpation surgical instrument must allow
surgeons to use natural finger motions and hand configurations. In
light of this, we observed surgeons in the operating room and developed
a taxonomy of hand configurations and finger motions used during open-incision
surgical palpation. The different palpation techniques observed were
classified based on manipulation ability, dexterity, tissue support requirements,
and working space constraints. The type of finger motions used depended
on what information the surgeon was after.
Measurement of Fingerpad Stiffness
A tactile feedback system that provides realistic feedback must take the
biomechanics of the human fingerpad into account. We performed an
experiment to measure force-displacement characteristics of the fingerpad
to indentations using a flat rigid plate. The results show the stiffness
of the fingerpad increases exponentially with plate indentation depth.
Related Publications
Peine, W.J., Wellman, P.S., and Howe, R.D., “Temporal Bandwidth Requirements for Tactile Shape Displays,” Sixth Annual Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, ASME International Mechanical Engineering Congress and Exposition, Dallas, Nov. 15-21, 1997, pp. 107-113.
W. J. Peine and R. D. Howe, “Do humans sense finger shape or distributed pressure when detecting a lump in soft tissue?” submitted to the Seventh Annual Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, ASME International Mechanical Engineering Congress and Exposition, Anaheim, Nov. 15-20, 1998.
D. T. V. Pawluk and R. D. Howe, " Dynamic lumped element response of the human fingerpad," ASME Journal of BiomechanicalEngineering 121(6):605-611, December 1999.